港仔機器人指揮控制系統(tǒng)數(shù)字孿生界面設計
發(fā)表于:
發(fā)表于:
01

2025年6月16日,香港首家具身智能人形機器人公司港仔機器人(00370)在香港科學園隆重舉行“香港智能機器人發(fā)展前景論壇暨港仔機器人具身智能品牌戰(zhàn)略啟幕式”活動。港仔機器人首次向全球展示香港本土具身智能人形機器人的創(chuàng)新成果,以“內地+香港”“科技+金融”“市場+運營”“生態(tài)+應用”的雙輪驅動戰(zhàn)略,強勢開啟人形機器人商業(yè)化新紀元。

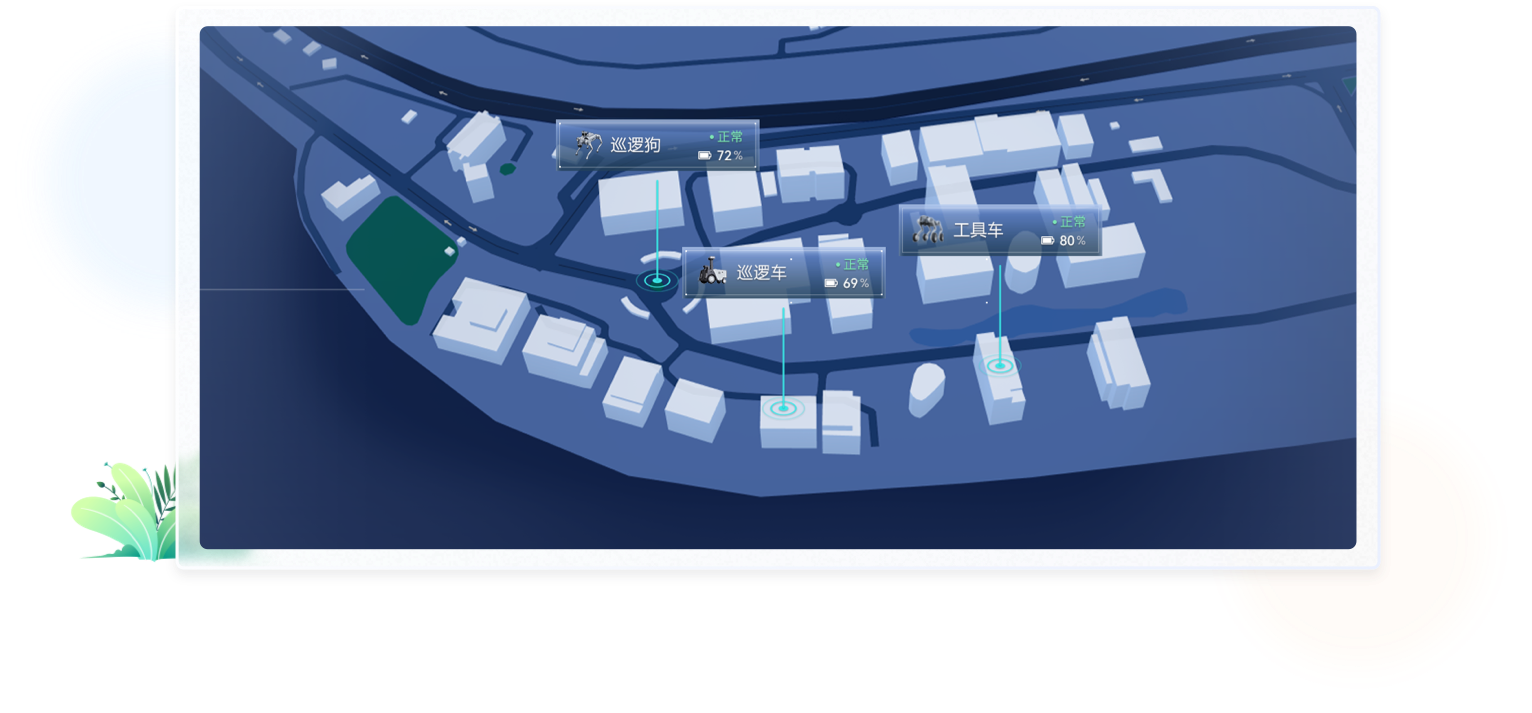
本次蘭亭妙微深度參與港仔機器人數(shù)字孿生界面設計工作,為香港智能機器人發(fā)展前景論壇暨港仔機器人具身智能品牌戰(zhàn)略啟幕式”活動設計產品界面和前端開發(fā)工作。首次使用3D高精度地圖與3D模型結合,探索地圖與數(shù)字孿生結合新模式。使用three.js+百度開發(fā)地圖平臺搭建地圖環(huán)境,強調實時映射與深度決策支持的具身智能孿生新范式,提升了指揮調度與態(tài)勢感知的精度與效率。?
02
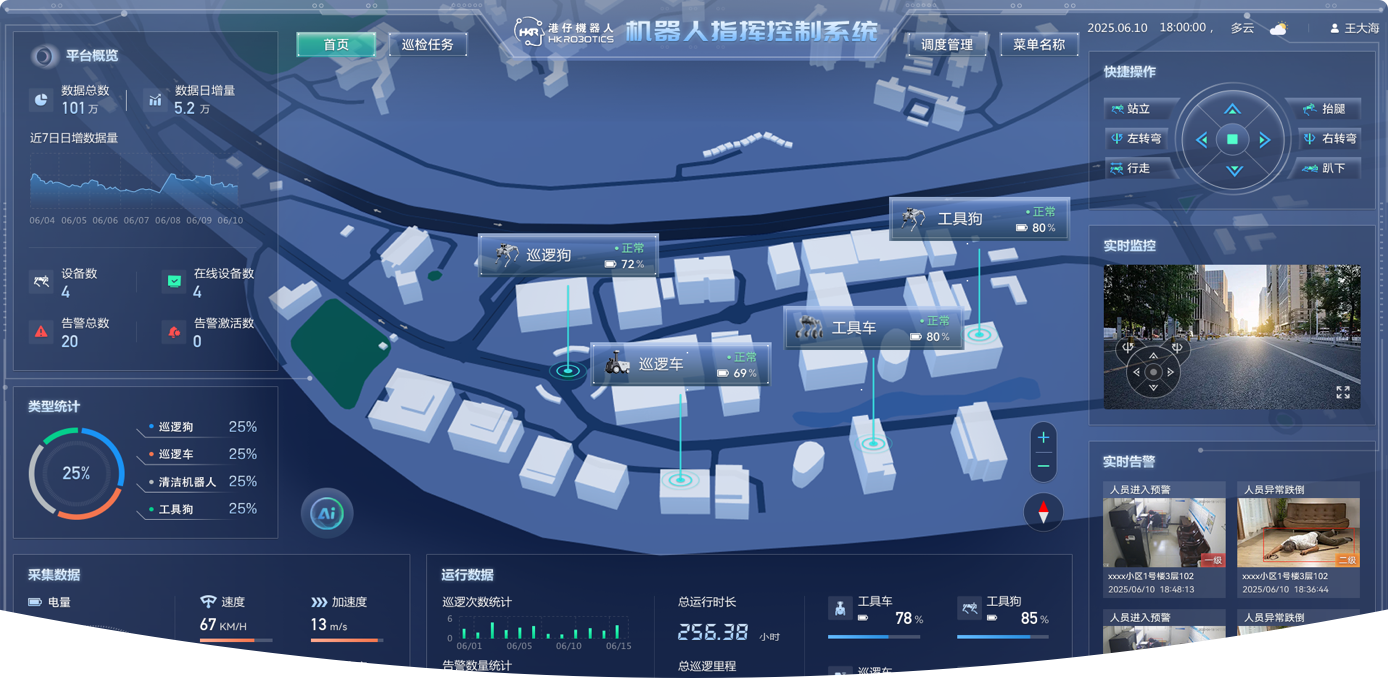
港仔智能機器狗數(shù)字孿生系統(tǒng)??用于全面感知、動態(tài)監(jiān)控與智能指揮戶外復雜環(huán)境中的機器狗運行狀態(tài)。產品定位是為智慧城市巡檢、安防監(jiān)控、工業(yè)設施巡查等多種場景及指揮中心提供??實時環(huán)境態(tài)勢感知、設備精準定位追蹤、作業(yè)任務協(xié)同管理、環(huán)境智能決策支持??等可視化、智能化的遠程操控與運維服務。
系統(tǒng)主要面向港口、園區(qū)等場景的機器人運維工程師、集群調度指揮官及授權遠端監(jiān)管人員,使用場景覆蓋多類型機器人協(xié)同作業(yè)管理。目標用戶具備機器人操控專業(yè)背景,熟悉設備運行邏輯與應急處置流程,對系統(tǒng)的實時監(jiān)控精度、告警響應效率及多設備協(xié)同能力要求嚴苛。集中于20-40歲,具備高度計算機操作素養(yǎng)。?
整體采用深藍科技風極簡架構,以信息展示效能為核心驅動。通過強化3D地圖與設備模型的空間立體表達,結合動態(tài)數(shù)據(jù)看板與分級告警系統(tǒng),實現(xiàn)零干擾的功能聚焦;精準運用冷色調數(shù)據(jù)可視化確保關鍵指標瞬時捕獲,在保障工業(yè)級專業(yè)嚴謹?shù)那疤嵯拢茉旄咝А⒗潇o且具有未來感的集群指揮控制界面。??
03
優(yōu)化信息架構,提升信息獲取效率
經過我們仔細的分析,并與新需求結合,發(fā)現(xiàn)原版設計存在一些問題, 不能滿足新的設計需求,分別是:1.?信息碎片化?:設備位置(地圖)、狀態(tài)(電量/速度)、告警事件分散在多個模塊(左/右/底部),指揮需反復切換視野;2.?關鍵指標埋沒?:核心參數(shù)如設備電量(文字“60%”)混在平鋪列表中,缺乏預警色標;突發(fā)告警(如“人員闖入”)無自動定位,需手動地圖搜索;3.?統(tǒng)計無效堆砌?:重復餅圖(類型統(tǒng)計)占比雷同(25%×4),未關聯(lián)實際任務量(如巡邏里程);4.場景感知缺失?:監(jiān)控視頻與設備狀態(tài)割裂,無法快速定位事件位置(如“102室異常”對應哪臺設備?)
優(yōu)化信息架構,一眼掌控全局,三步解決關鍵問題”——這套指揮系統(tǒng)把機器狗、巡邏車的位置動態(tài)全‘釘’在3D地圖上(比如工具車電量剩60%直接標紅預警),左邊餅圖柱圖說清設備分布和任務量,右邊實時刷新速度電量舒適度,突發(fā)告警(如人員闖入)自動彈窗定位+調視頻。以前要翻七八個頁面查的數(shù)據(jù),現(xiàn)在一屏看透,指揮效率翻倍還不費腦!??本質上是把分散的“數(shù)據(jù)碎片”拼成一張活的作戰(zhàn)沙盤,指揮員盯著屏幕就能運籌帷幄,

三維空間決策中樞
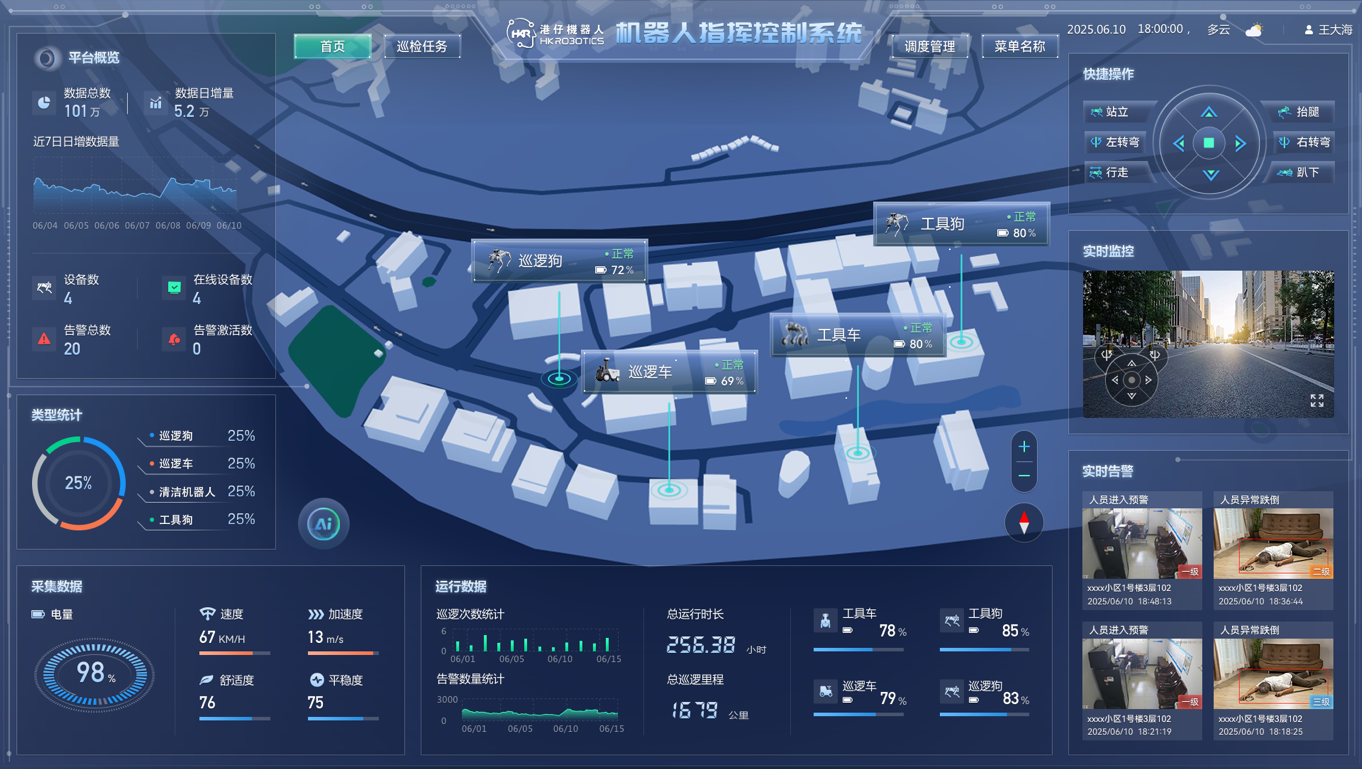
模塊化數(shù)據(jù)驅動看板
基于運維場景重構數(shù)據(jù)優(yōu)先級:
核心指標強引導?:電量環(huán)(紅/黃閾值預警)、速度加速度儀表盤采用高對比色彩編碼;
?業(yè)務流可視化?:巡邏里程/次數(shù)趨勢圖(折線圖)+設備類型分布(餅圖)形成決策閉環(huán);
零認知負荷設計?:精準聚焦設備類運行健康指標,減少信息冗余,強化狀態(tài)感知。

人機協(xié)同敏捷控制?
整合「AI助手+快捷指令」雙通道控制:
自然語言交互?:支持“規(guī)劃巡檢路線”“查詢告警”等語音指令,AI自動生成可執(zhí)行方案(如“檢查5樓燈光”路線);
?高頻操作固化?:“站立/轉彎/趴下”等物理按鍵直通設備,降低多設備協(xié)同操作復雜度。指令響應效率較傳統(tǒng)下拉菜單提升200%。

數(shù)字孿生-讓機器人在數(shù)字世界活起來
行走

行走

行走

行走

行走
04





您是否有此類頁面的設計需求?歡迎聯(lián)系我們